スマート・マニュファクチャリングは世界的なトレンドとなり、労働力不足が当たり前となっています。エンジニア不足により非伝統的なエンジニアがシンプルな自動化プログラムの作成によりインダストリー 4.0 にアップグレードすることが急務とも言われています。
これらのニーズに応えるため、ICOP は産業用 Arduino ベースのグラフィカル・ソフトウェア・ツールと SQL ライブラリを使用してリアルタイム・インダストリー 4.0 への迅速な更新を可能にする完全な EtherCAT ソリューションを開発しました。

EtherCAT はもともとはBeckhoff Automation (ベッコフ オートメーション) によって開発され、ETG (EtherCAT Technology Group) によって保守されているリアルタイム産業用イーサネット技術です。IEC 規格 IEC61158 で開示されている EtherCAT プロトコルはオートメーション技術、テスト、測定におけるハードとソフトのリアルタイム要件、並びに他の多くのアプリケーションに適しています。
EtherCAT 開発中の主な焦点は、短いサイクル時間 (≤ 100 µs)、正確な同期のための低ジッター (≤ 1 µs)、および低いハードウェア コストでした。
EtherCAT には次の特徴があります:
- 柔軟なトポロジー
- 高速性能
- 高精度時刻同期機能
EtherCAT のアドレッシング・モードとEC-Slave ハードウェアによって実行されるメモリ制御技術 ”Fieldbus Memory Management unit (FMMU)" により、単一のインターネット・パケットを渡すだけで、バス上のすべての ECAT-Slave からすべてのデータを同期的にやり取りできます。
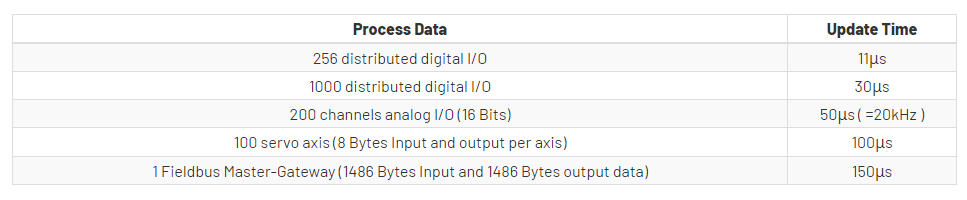
EtherCATスレーブには通常、EtherCATスレーブIC(ESC)が搭載されています。FMMU技術により1000台のI/Oデータのやり取りがわずか30us以内で、100軸のサーボモーターのデータ交換が100us以内で完了することができます。下記表をご参照ください(ETGデータによるEtherCATの性能概要 ソース:http://www.ethercat.org/)
参照: The Benefits of Using the EtherCAT Transmission Standard
ICOPの EtherCAT は EtherCAT の完全なソリューションを提供し、リアルタイム IIOT システムでカーボン フットプリント (出力) を監視
QEC は EtherCAT マスタおよび一般的な EtherCAT スレーブ モジュール (デジタル I/O、アナログ I/O、RS232/485、コンバータ、モーション・コントローラ/ドライバなど) を含む EtherCAT の完全なソリューションを提供します。幅広い産業オートメーション・アプリケーションのために高度に統合されたハードウエアとソフトウエアにより経済的な産業用 IoT スマート テクノロジを作成できます。
QEC 製品:
- EtherCAT マスタ: QEC-M-01, QEC-M-043T, QEC-M-070T, QEC-M-090T, QEC-M-150T
- EtherCAT スレーブ: デジタルIO, ステッパ・モータ・コントローラ, HID
QEC ハードウエア特長:
- QECシリーズはすべてリサイクル可能な金属ケースを採用
- Vs と Vp (5V-56Vdc) 、2 つの相互に絶縁された電源入力をサポート
- RJ-45 ネットワーク 24V/3A 電源をサポート、ORing 電源システム自動的切り替え
- ハードウェア内部ステータス電圧、電流、および動作温度の監視により、工業製造製品の二酸化炭素排出量を計算し、製品の二酸化炭素排出量の追跡をさらに支援
- EtherCAT ケーブルの冗長性をサポート、1 つのネットワークに障害が発生してもシステム・クラッシュ無し
- EtherCAT ネットワークが切断された場合、またはエラーが発生した場合、LED が点滅または点灯したままになり、プログラミング層にエラー コードが表示
- マルチカラーの端子台はカラーコード識別方法を使用しているため、簡単に識別でき設置時の時間を節約しながら人的ミスの可能性を大幅に削減。企業向けの EtherCAT デバイスの導入にかかる労力と時間のコストを削減
QEC リアルタイム・オペレーション・サポート:
QEC-M シリーズはデュアルコア独立動作 DM&P Vortex86EX2 プロセッサを使用、リアルタイムで信頼性の高い同期 EtherCAT 制御を行う EtherCAT マスタです。プロセッサのマスタ・コアは Arduino 開発環境として機能し、プロセッサのスレーブ・コアはリアルタイム EtherCAT マスタとして機能し、2 つのコアはプロセッサ間通信 (IPC) を介してデータを交換します。
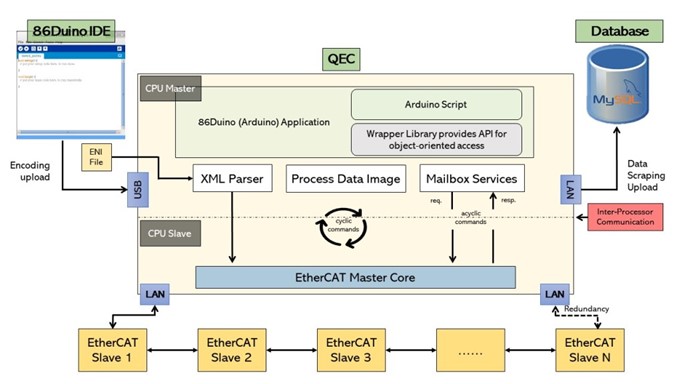
- CPU マスタ:
マスタ・コアは 86Duino (Arduino) アプリケーションの開発環境として機能します。 IDE 内のすべての開発プログラムはマスタ・コアで処理されます。マスタ・コアはイーサネット経由で外部ネットワークに接続するようにスレーブ・コアのデータを収集/交換し、そのデータをリモートサーバまたはデータベース (Apache、MySQL、MariaDB など) にアップロードします。 - CPU スレーブ: スレーブ・コアは QEC-M の EtherCAT マスタ・ドライバ・コアであり、リアルタイムで正確な同期機能を備え、EtherCAT スレーブからリアルタイム データを収集/交換しデータはIPC経由でプロセッサのマスタ・コアとやり取りされます。
ICOPの EtherCAT ソリューション は産業用 Arduino による完全なリアルタイム・インダストリー 4.0 をサポート
QEC は産業用イーサネット技術である EtherCAT のハードウェア基盤を使用しています。EtherCAT の完全なソリューションを提供するだけでなく、産業用 Arduino の開発環境もサポートしています。
ユーザは86Duino IDE の豊富なサンプル、関数、およびグラフィカル ・プログラミング・ツールの組み込みライブラリを使用して、開発時間とエンジニアリング・スタッフのしきいを下げることができます。さらにユーザーは MySQL ライブラリを使用してビッグデータ・データベースを構築し、すぐにリアルタイム IIoTへアップグレードすることもできます。
EtherCAT開発を簡単に
多くの産業用アプリケーションは、高精度と同期動作速度を必要とするため、非常に複雑で開発期間が長くなります。しかしQEC 対応の 86Duino IDE (Industrial-Arduino) を使用することで、専用の EtherCAT ライブラリがプログラムとEtherCAT システム・オペレーション用の豊富な Arduino API を提供します。
デジタル制御、アナログ制御などの一般的な基本機能に加えて、ユーザ・インターフェイスを作成するための軽量グラフィック・ライブラリLVGL、MySQLを含む、イーサネット、SPI、シリアル、または Modbus など開発者が使用する多数のオープンソース関数ライブラリとサンプルがあります。
ユーザは EtherCAT マスタとスレーブをすばやく構成できるグラフィカルな EtherCAT コンフィグレーション・ツールである 86EVA (EtherCAT-Based Virtual Arduino) を使用してシステムを開発することもできます。
最後にユーザはGUI 設計支援、HMI エディタ、および ドラッグ・アンド・ドロップ・プログラム・ビルダ ArduBlockで構成される理想的な QEC Low-Code 開発プラットフォームを使用して完全なシステムを開発できます。
-1.png)
QEC Low-Code 開発キット, ユーザ操作 ステップ・バイ・ステップ ビデオ
ICOP EtherCAT ソリューション オンライン資料
ICOP EtherCAT ソリューション は開発者向けにオープンソフトウェア・リソースの完全なセットを提供します。
86Duino 環境は多くのプログラミング・プラットフォームと同様に、ライブラリを使用して拡張できます。ライブラリはハードウェア操作やデータ操作など、スケッチで使用するための追加機能を提供します。多くのライブラリは IDE と共にインストールされ、Arduino 標準ライブラリのほか、86Duino 固有のハードウェア機能を利用するための専用ライブラリを提供します。
また独自のライブラリをダウンロード、または作成することもできます。ライブラリのインストールの詳細についてはこれらの説明を参照してください。独自のライブラリを作成するためのチュートリアルもあり、適切なArduinoスタイルのAPIを作成するためのガイドラインについては、ArduinoのAPIスタイルガイドを参照してください。
Arduino Standard ライブラリ・サポート
- EEPROM – “permanent” ストレージへの読み書き
- Ethernet – オンボード LAN コネクタを使用してのインターネット接続
- Firmata – 標準シリアル・プロトコルを使用してコンピュータ上のアプリケーションとの通信
- LiquidCrystal – リキッド クリスタル ディスプレイ (LCDs) 制御
- SD – SDカードの読み書き
- Servo – サーボモータ制御
- SPI – Serial Peripheral Interface (SPI) バスを使用してのデバイスとの通信
- SoftwareSerial – デジタル・ピンにソフトウエアで実装されたシリアル通信
- Stepper – ステッパ・モータ制御
- Wire – Two Wire Interface (TWI/I2C) によるネットを越えたデバイスまたはセンサー・データ送信/受信
86Duino のみのライブラリ
- Motion86 – 86duino を 多軸モーション・コントローラとして作成
- Modbus – 様々な Modbus ASCII/RTU/TCP デバイスとの通信
- CANBus – Controller Area Network (CAN バス)を使用するデバイスとの通信
- FirmataPlus86 – 86Duino with Scratchとの接続
- Servo86 – ロボット・モーション制御のための拡張サーボモータ・ライブラリ
- AIServo86 – ロボット・モーション用のシリアル・サーボモータ・ライブラリ
EtherCAT ライブラリ
- ECAT Lib – QECを EtherCAT システムとして作成
Arduino (Non-standard) ライブラリ・サポート
- Audio – Arduino Due のオーディオ・ライブラリの API による、オンボード HD オーディオ・インターフェイスへのアクセス
- TimerOne – Arduino TimerOne ライブラリの API による、86Duino の 32-bit hardware timer へのアクセス
- MsTimer2 – Arduino MsTimer2 ライブラリの API による、86Duino の second hardware timer へのアクセス
- Time86 – Arduino Time ライブラリの API による、オンボード RTC タイマーの読み取り